 服务热线:027-65330590服务热线:027-65330590
服务热线:027-65330590服务热线:027-65330590

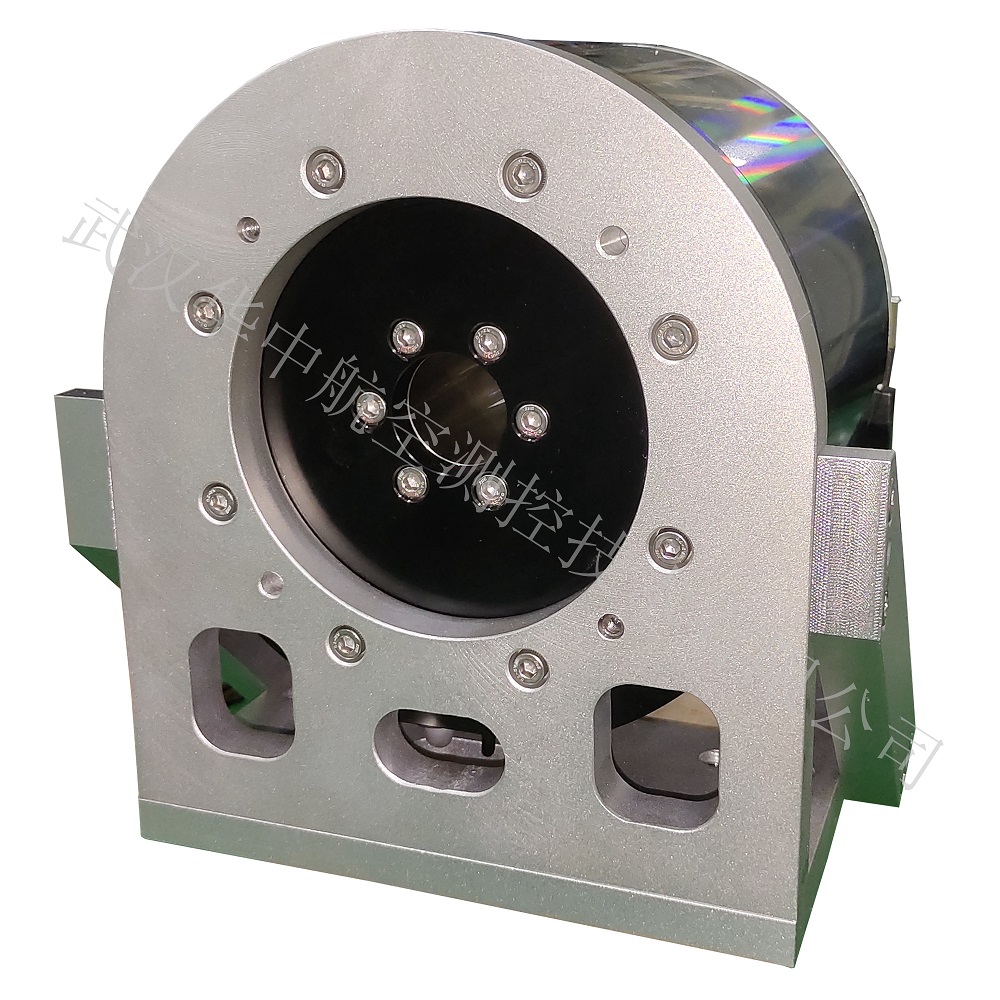
大型灭火/水上救援水陆两栖飞机机械位移发生器主要在试验过程中产生力信号和位移信号,驱动驾驶操纵机构(驾驶柱、 盘以及脚蹬)运动,作为飞行控制系统的输入指令,以达到模拟飞行员操控动作的效果。
机械位移发生器用于飞行控制系统青争、动态特性测试,在飞行控制系统地面模拟试验中,通过机械位移信号发生器,模拟换操纵驾驶盘、柱和脚蹬运动,进行操纵力特性、系统增益、系统频响等各项试验,验证
飞行控制系统的各项功能和性能。
机械位移发生器主要包括工装(结构部分)、控制、驱动组成。
|
序号 |
指标参数 |
技术指标 |
||
|
1 |
机械位移发生器 |
俯仰 |
横滚 |
偏航 |
|
2 |
操纵行程 |
前推≥110mm 后拉≥135mm |
≥±70° |
前行程≥90mm 后行程≥90mm |
|
3 |
限制载荷 |
1330N |
356N |
1330N |
|
4 |
最大操纵力 |
前推208N 后拉260N |
110N |
333N |
|
5 |
最大速度 |
550mm/s |
300°/s |
400mm/s |
|
6 |
控制通道 |
不小于4通道 |
||
|
7 |
位控方式 |
系统静态精度优于±0.5%FS |
||
|
8 |
力控制方位 |
静态输出力误差小于0.5%FS |
||
|
9 |
全行程测量精度 |
优于0.5%FS |
||
|
10 |
系统输出和测量频率范围 |
0.01Hz~10Hz |
||
