服务热线:027-65330590服务热线:027-65330590
服务热线:027-65330590服务热线:027-65330590今年5月,由中国航天科技集团有限公司五院抓总研制的我国空间站天和核心舱入轨后不久,一段空间站核心舱机械臂在空间站上“闪转腾挪”的模拟动画火遍全网。
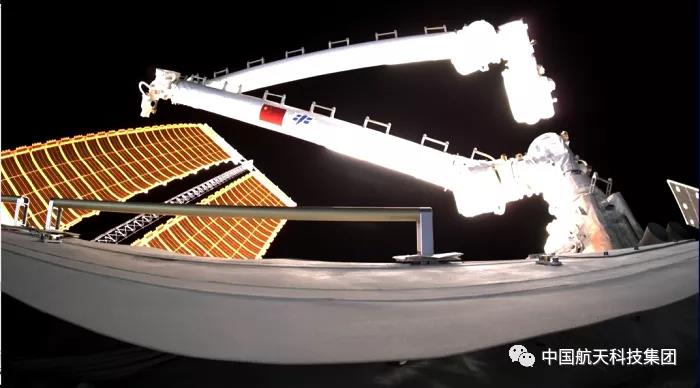
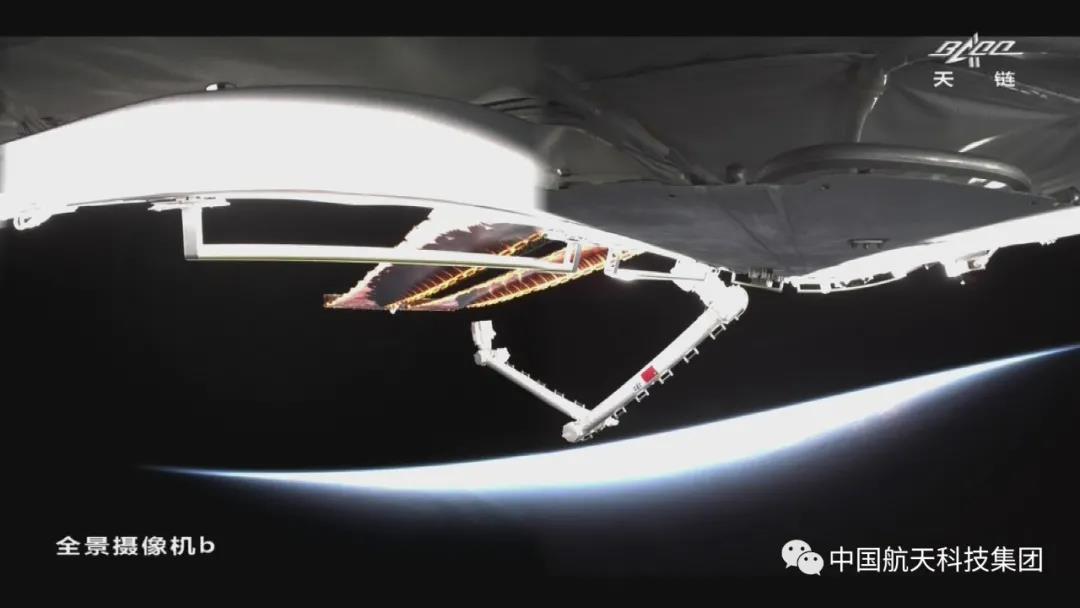
我国空间站核心舱机械臂由航天科技集团五院总体设计部抓总研制。空间站核心舱机械臂是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统,主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务。其中,核心舱机械臂展开长度为10.2米,最多能承载25吨的重量,是空间站型号任务中融合了机、电、热、控制、光学等多个专业的“大力士”。
空间站核心舱机械臂是一款模仿人类手臂的七自由度机械臂。核心舱机械臂的肩部设置了3个关节、肘部1个关节、腕部3个关节,一共7个关节。每一个关节对应一个自由度,就如同人的手臂一般,具有七自由度的活动能力。通过各个关节的旋转,机械臂能够实现自身前后左右任意角度与位置的抓取和操作,真实地模拟人类手臂的灵活运动,为航天员顺利开展出舱任务提供了强有力的保证。